

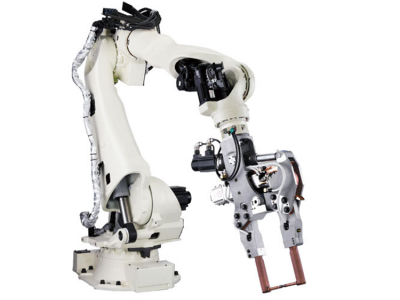














点焊机器人50KG 点焊机器人由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成,由于为了适应灵活动作的工作要求,通常电焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。其驱动方式有液压驱动和电气驱动两种。 点焊机器人50KG参数说明
| 电流 | 交流 |
| 驱动形式 | 自动 |
| 作用对象 | 金属 |
| 控制方式 | 自动 |
| 焊接原理 | 对焊 |
| 焊接材质 | 低碳钢 |
| 频段 | 双脉冲 |
| 保护气体类型 | CO2 |
| 用途 | 焊接 |
| 负载持续率 | 60% |
| 规格 | 165KG |
| 包装 | 木箱 |
zmff005





















